I began my research career with a medical device company working on the
development and minimally invasive surgical application of a robotic
system. Advances in robotic applications that I helped develop have made
it possible to perform minimally invasive heart surgery. I have traveled
throughout the United States, Germany, Finland, China, and Japan
participating in animal and human operations.
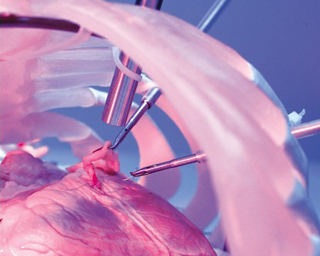
ZEUSTM robotic surgical system
Minimally invasive heart surgery
Academia (Part 1: PhD)
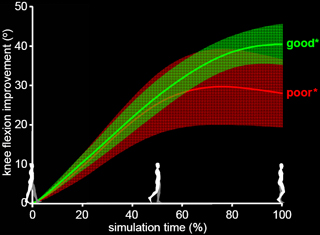
I built upon my clinical research and medical device experience as a
doctoral student by developing and applying simulation software to
predict post-treatment outcome for gait-related disorders. I developed a
new approach using computational models based on engineering mechanics
and optimization to predict post-treatment outcome using pre-treatment
data on an individual patient basis.
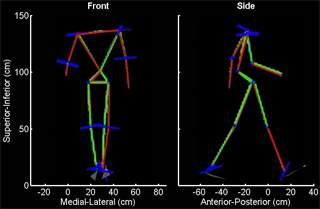
Simulated post-treatment outcome
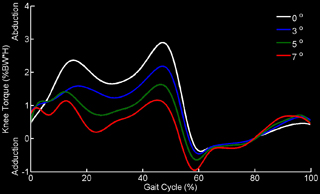
Predicted joint torques of various treatments
Academia (Part 2: Postdoc)
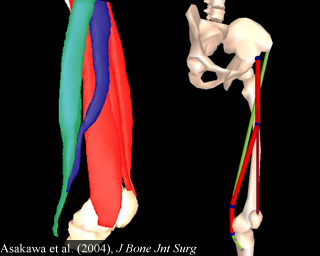
I drew from my clinical research and simulation software experience as an engineering research associate to develop and apply physics-based simulations to
study the dynamics and function of human health and disease. Gait
abnormalities commonly observed in children with cerebral palsy are
typically treated by surgically altering muscle function. Unfortunately,
this treatment strategy does not consistently result in improved
outcome. I investigated the utility of patient-specific simulations
to determine the potential efficacy of surgical correction.
My background in developing and applying computational tools to complex
dynamic systems has uniquely positioned me as a leader in the use
of patient-specific simulation to improve treatment for movement
disorders. I have a primary faculty appointment in engineering, but I
understand that maintaining close clinical collaborations is
essential to my future success. Research in my lab focuses on
projects linking cutting edge engineering simulation tools to clinically
relevant neuromuscular biomechanical problems.